OEM

Maßgeschneiderte Automationslösungen für Ihre Anwendungen.
Die Böning Automationstechnologie GmbH & Co. KG ist Ihr zuverlässiger Partner für OEM-Lösungen im Bereich Schiffsautomation. Mit jahrzehntelanger Erfahrung in der Entwicklung hochwertiger Hard- und Software bieten wir individuell anpassbare Systeme, die exakt auf Ihre Anforderungen zugeschnitten sind.



Ein 8,8“ Farbdisplay dient als kompakte und vielseitige Anzeigeeinheit, die primär zur Anzeige von Betriebsdaten und Alarmen verschiedener Schiffsmotorsysteme (EDC- und Common Rail) konzipiert wurde. Alle relevanten Anzeigedaten wurden mit dem Motorhersteller abgestimmt. Durch enge Zusammenarbeit konnte eine optimale Kombination aus Funktionalität und Zuverlässigkeit erreicht werden.
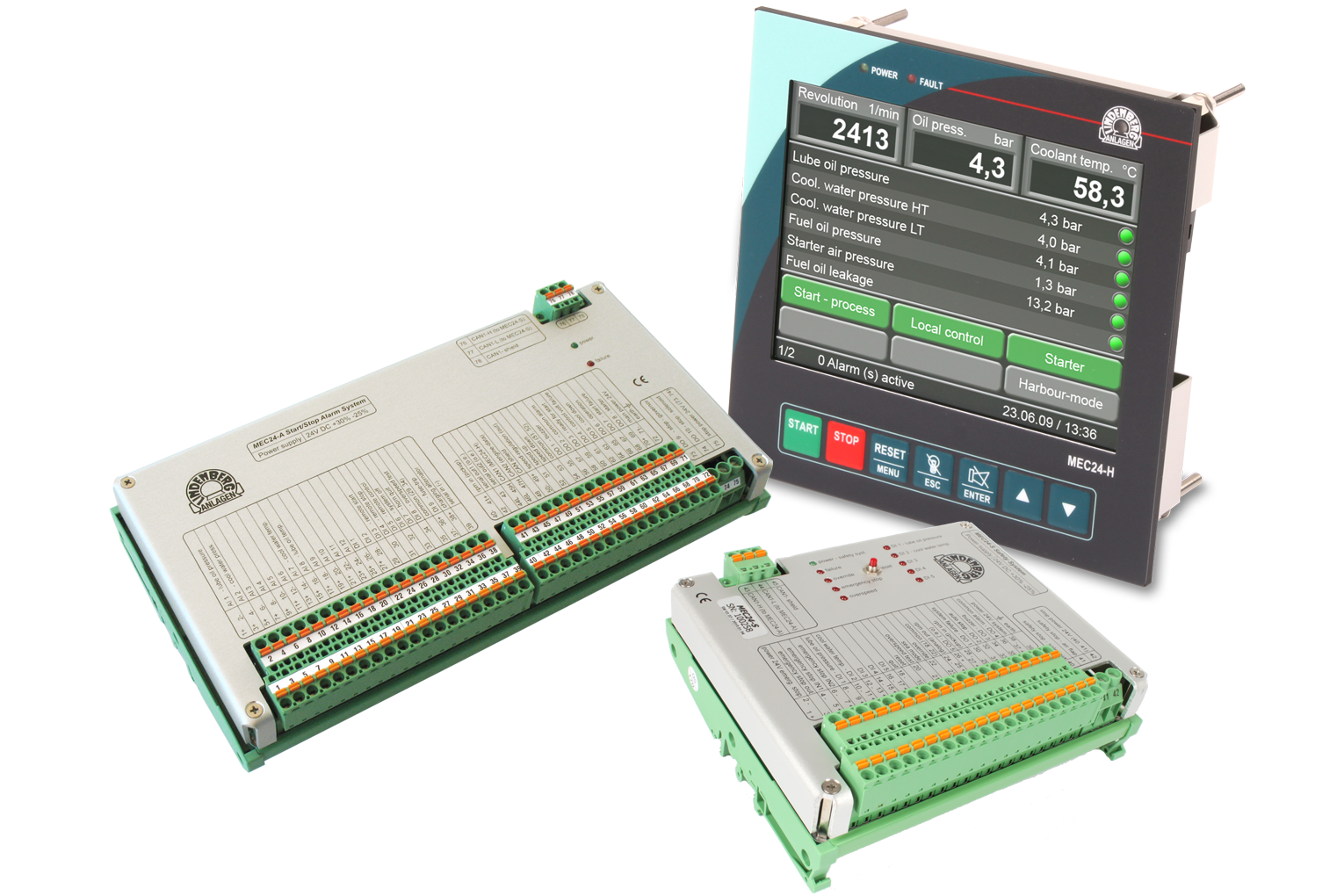
Mehrere kundenspezifische Geräte bilden ein kompaktes System zum Starten, Stoppen und Überwachen von Dieselaggregaten. Diese Entwicklung wurde für den Schiffsbetrieb konzipiert und erfüllt alle Eigenschaften als Alarm- und Sicherheitssystem nach den Richtlinien der Klassifikationsgesellschaften (ABS, BV, CRS, DNV, LR, RS). Die Adaptierung verschiedener Motorsteuergeräte ist problemlos möglich, unter anderem auch für aktuelle EDC-17 Systeme.

Das B⋮LINK Chartplotter Gateway ist eine einfache und kostengünstige Lösung zur Bedienung von Gensets. Die spezifisch adaptierte Software bietet eine optimale Visualisierung mit intuitiver Bedieneroberfläche, alle erforderlichen Funktionen zur Steuerung und Überwachung des verwendeten Gensets wurden implementiert. Die auf B⋮LINK installierte Applikation kommuniziert mit den verbundenen Generatorsystemen via ModBus RTU (RS485), die anzuzeigenden Daten werden an den Chartplotter gesendet.

Dieses System zur Steuerung und Überwachung eines konventionellen Bugstrahlruders (Drehstrom-Asynchronmotor mit Festpropeller)wurde in enger Zusammenarbeit mit dem Hersteller entwickelt. Die Standardkonfiguration besteht aus einer zentralen Steuereinheit AHD 501 (im Bugstrahlruder-Steuerschrank) und bis zu drei Bedien- und Anzeigeeinheiten AHD 502 (auf der Brücke und den Nockfahrständen BB und STB). Die Kommunikation erfolgt über einen gemeinsamen CAN-Bus.